Starting
Atmel-Avr Programming
ratmcu,5/10/2014
11:42:05 AM
You might
already have experiences of microcontroller programming with Microchip PIC. But
as a more convenient industrial approach you may look forward to Atmel
microcontrollers. So this article will guide you through the process of
starting to programming Atmel AVRs with a self-made ISCP programmer. This
programmer is made up with a Atmel uC itself so prior to everything we should
flash our programmer uC with the firmware.
STEP 1: Building a Serial programmer to flash the
firmware.
Fig 1: SI
programmer.
STEP 2: flash the firmware and fuses to the Attiny uC
using avrdude.
·
Install Avrdude on your PC.
Ø
Using the “WinAVR-20100110-install.exe-WinAVR”.
·
Open cmd and type avrdude.
·
You should see
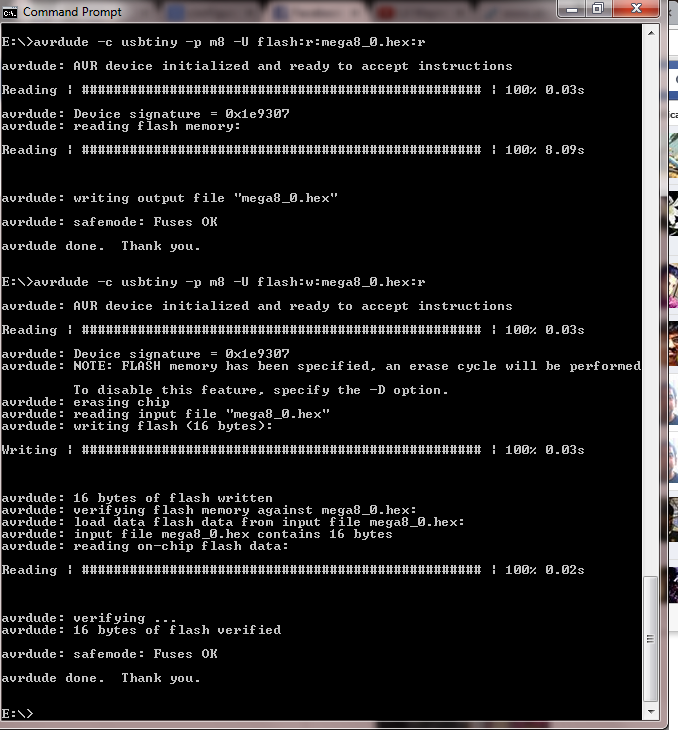
Fig 2:
avrdude console.
·
Type “avrdude –c ? “ this will give you the available list of
programmers somewhere you’ll see si-prog mentioned.
·
Change thedirectory to the folder
containing vusbtiny.hex file and execute following 2 commands
1.
avrdude -c usbtiny -p
t45 -U flash:w:usbtiny.hex
2.
avrdude -c usbtiny -p
t45 -V -U lfuse:w:0xe1:m -U hfuse:w:0x5d:m -U efuse:w:0xff:m
·
If your
setup is good and you’re lucky enough you’ll see something like below.
STEP 3: building the usb programmer.
Fig 3:
schematic.
Fig4: PCB
layout_positions.
Fig5: PCB layout.